Урок 4
Управление дискретной задвижкой
Задание
В TIA Portal Разработать программу PLC и HMI управления дискретной задвижкой.
Решение
Для примера рассмотрим задвижку с физическим интерфейсом:
| Входы задвижки | Примечания |
|---|---|
| Открыть* | Управляющие входы настраиваем на потенциальный режим работы |
| Закрыть* | |
| Авария (Trip) | Переводит задвижку в безопасное состояние, которое выбирается с помощью настроек |
| Стоп | Останавливает привод задвижки, если входы Открыть и Закрыть настроены на импульсный режим работы |
| Выходы задвижки | |
| Открыто* | Нормально-открытые контакты концевых выключателей |
| Закрыто* | |
| М1 | Многофункциональные выходы |
| М2 | |
| Готовность* | Готовность = дистанционное управление + отсутствие неисправности |
| Неисправность |
Входы ПЛК физически связаны с выходами задвижки для получения информации о состоянии задвижки), а выходы ПЛК физически связаны с входами задвижки для управления состоянием задвижки.
| Дискретные входы ПЛК (DI) |
|---|
| Открыто |
| Закрыто |
| Готовность |
| Дискретные выходы ПЛК (DO) |
| Открыть |
| Закрыть |
| Входы | Цвет | Описание |
|---|---|---|
| Программные кнопки | ||
| Ручной режим | Зелёный фон, если режим активен | Задвижкой управляет оператор через HMI |
| Автоматический режим | Задвижка управляется автоматически программой ПЛК | |
| Открыть | Задвижка открывается/закрывается при коротком нажатии на кнопку | |
| Закрыть | ||
| Стоп | Движение задвижки прекращается | |
| Сброс | Сброс ошибки «Превышено время хода» | |
| Уставки | ||
| Время полного хода задвижки | ||
| Выходы | ||
| Индикаторы состояния | ||
| Местный режим | Зелёный фон, если режим активен | Выбирается с помощью переключателя режимов на самой задвижке Дистанционный-Местный. Задвижкой управляет оператор с помощью кнопок Открыть-Закрыть на самой задвижке. |
| Среднее положение задвижки | Серый | Не сработал ни один конечный выключатель |
| Задвижка открывается | Мигает: белый-серый | |
| Задвижка закрывается | Мигает: чёрно-серый | |
| Задвижка открыта | Белый | |
| Задвижка закрыта | Чёрный | |
| Превышено время хода задвижки | Жёлтый | Время открытия или закрытия задвижки превысило уставку времени хода |
| Авария концевых выключателей | Красный | Одновременно сработали оба концевых выключателя |
Входы графического интерфейса получают информацию о состоянии с выходов программного блока управления задвижкой, а выходы HMI управляют задвижкой через входы программного блока.
Алгоритм управления задвижкой
Задвижка управляется с местного пульта (Local) или дистанционно от ПЛК (Remote). Если полевой оператор переводит переключатель режима работы на местном пульте управления в положение "Дистанционный режим", то панельный оператор может выбрать с помощью HMI один из двух дистанционных режимов управления задвижкой: ручной или автоматический.
В дистанционном ручном режиме задвижка управляется панельным оператором с помощью программных кнопок на фейсплате HMI, в дистанционном автоматическом режиме задвижка управляется по программе ПЛК.
Если в автоматическом режиме задвижка открывается или закрывается дольше времени, заданного уставкой "Время полного хода задвижки", то выдаётся предупредительное сообщение "Превышено время хода задвижки".
Если одновременно сработали оба концевых выключателя, то выдаётся аварийное сообщение "Авария концевых выключателей".
-
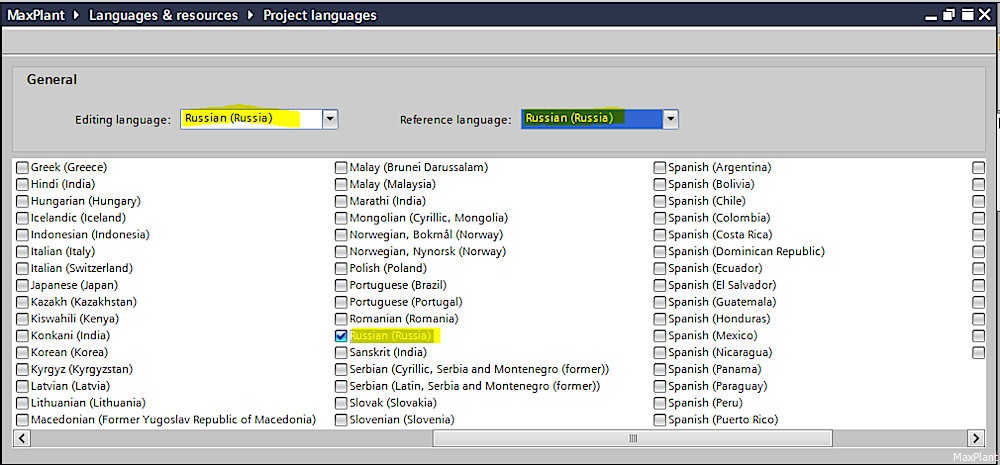
Выбираем язык проекта:
Tools > Project languages
-
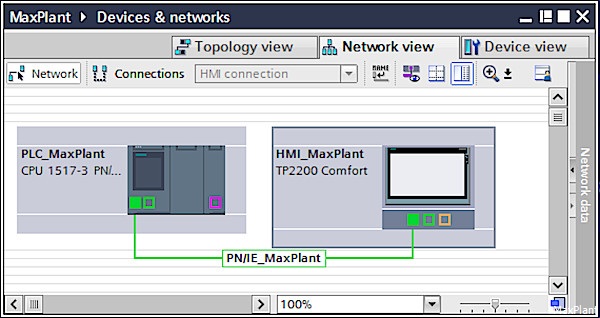
В редакторе Device Configuration конфигурируем контроллер S7-1500 и панель оператора:
Краткое описание Артикул 1 CPU 1517-3 PN/DP 6ES7 517-3AP00-0AB0 2 DI 16x24VDC HF 6ES7 521-1BH00-0AB0 3 DQ 8x24VDC/2A HF 6ES7 522-1BF00-0AB0 4 TP2200 Comfort 6AV2 124-0CX02-0AX0
-
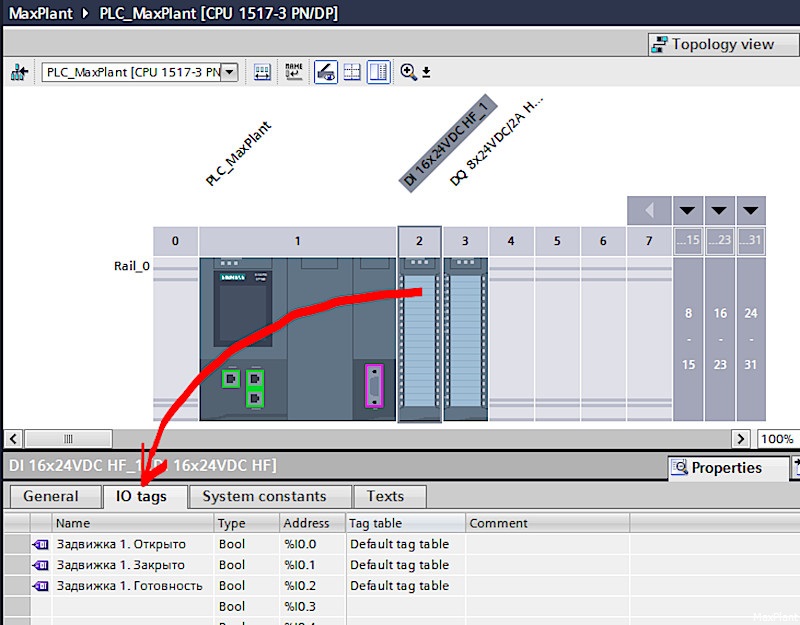
Присваиваем символьные имена тегам дискретных входов ПЛК:
-
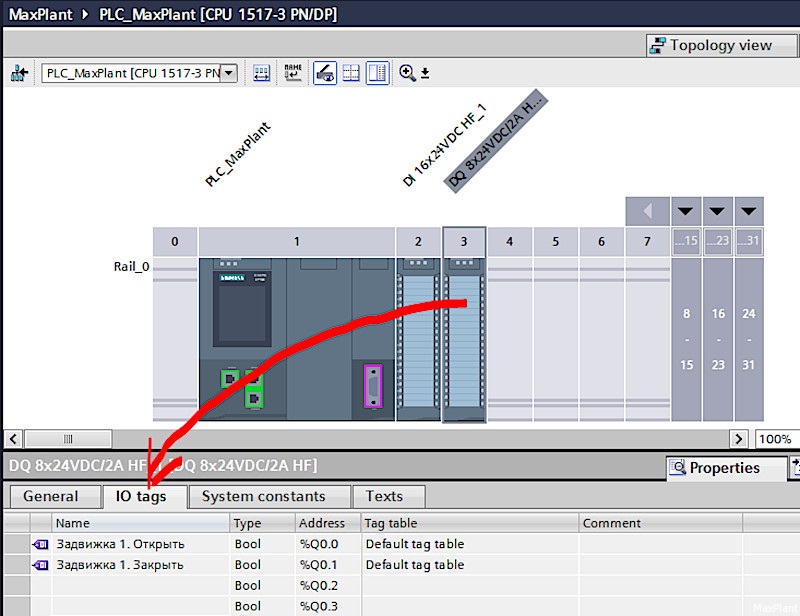
Присваиваем символьные имена тегам дискретных выходов ПЛК:
-
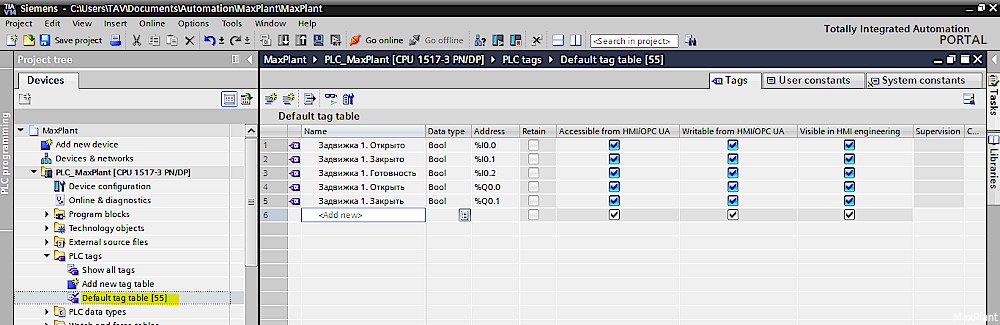
В результате получаем таблицу ПЛК-тегов:
-
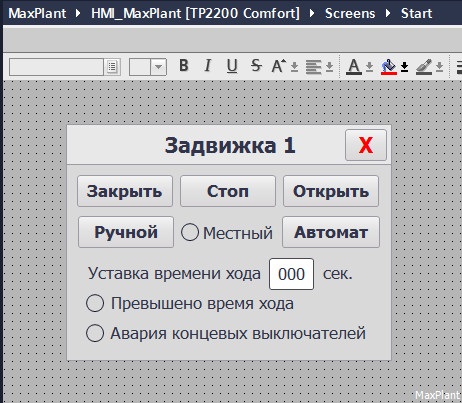
В редакторе экранов панели оператора создаём новый экран с именем Start и конфигурируем графический HMI интерфейс управления задвижкой (пока без привязки к тегам):
-
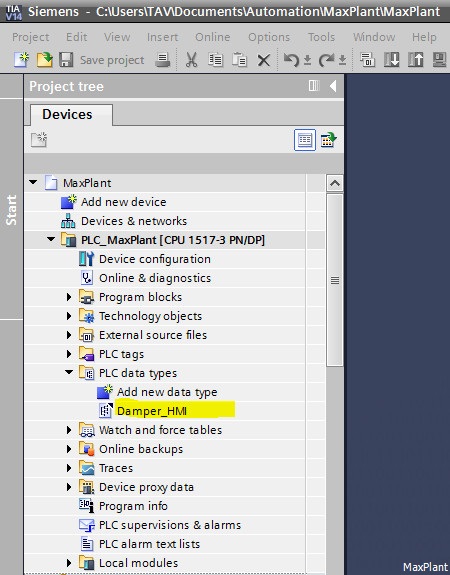
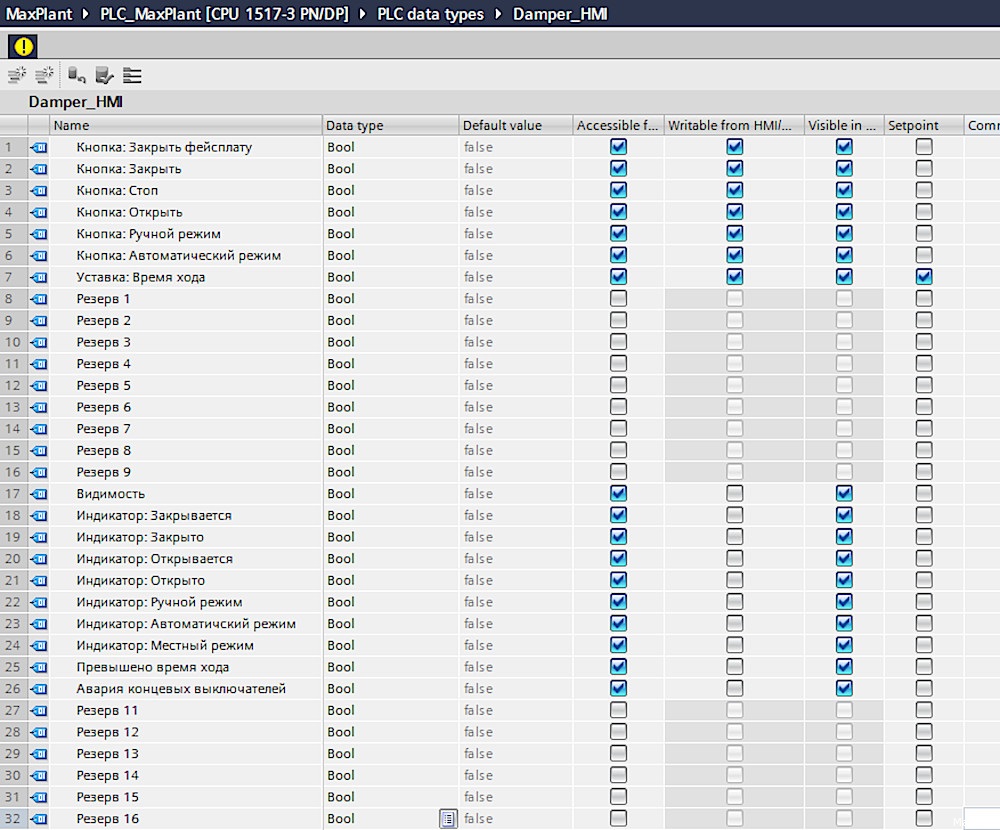
Создаём тип данных PLC data type с именем Damper_HMI, который пригодится для создания фейсплаты HMI задвижки:
-
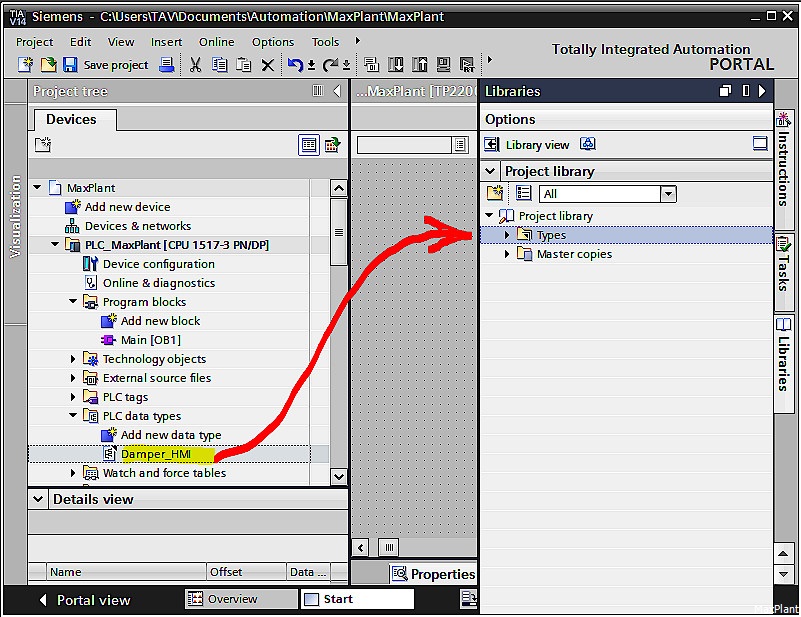
Перетаскиваем мышкой созданный тип данных ПЛК в библиотеку проекта:
-
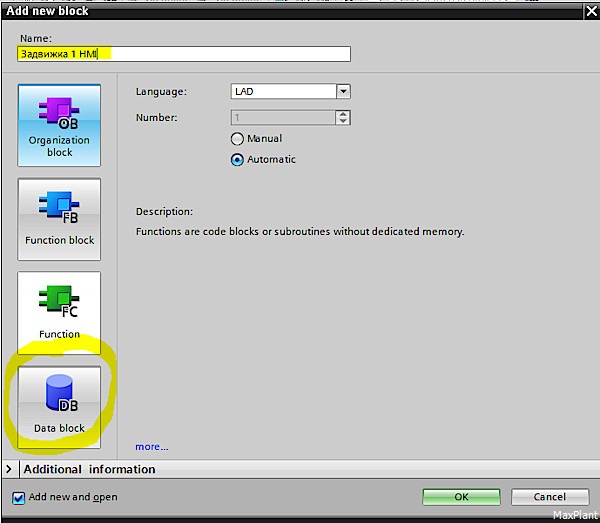
Генерируем глобальный блок данных, через который HMI будет обмениваться данными с программным функциональным блоком:
-
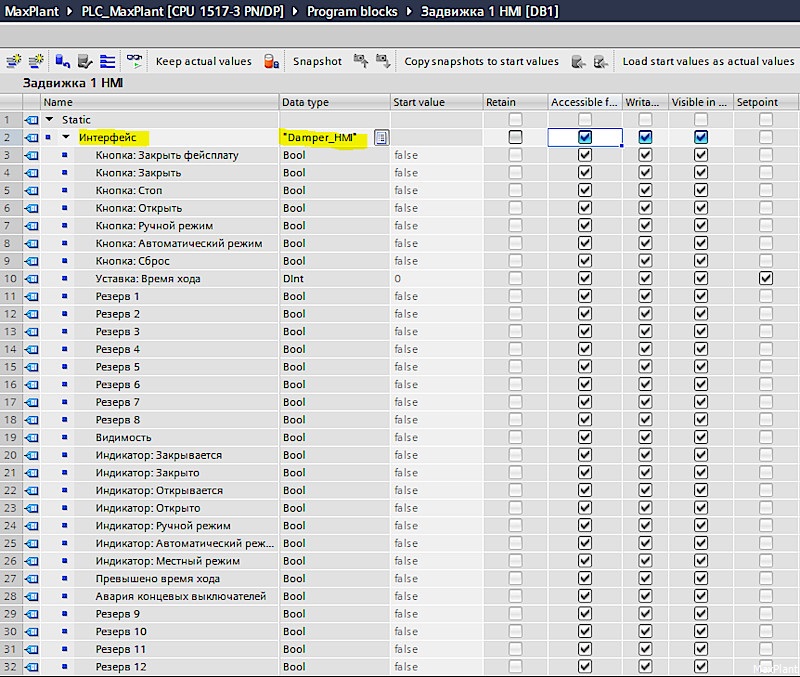
Добавляем в блок данных один тег с именем "Интерфейс" и структурным типом Damper_HMI:
-
Тег "Интерфейс" состоит из двух слов по 16 бит:
- Данные ввода HMI задвижки передаются в первое слово
- Данные вывода HMI задвижки передаются из второго слова
Продолжение в следующих уроках:
- создание фейсплаты HMI задвижки
- программирование управления задвижкой.