Принцип работы
Регуляторы процесса
Регуляторы процесса (Process Controllers) – это параметрируемые цифровые контроллеры со встроенным набором стандартных функций для регулирования технологических переменных (температуры, давления и т.п.).
В качестве сигналов задания (Reference) могут использоваться как фиксированные уставки (Fixed Setpoints), так и внешние (External).
Аналоговые входы используются для подключения датчиков обратной связи (термометров сопротивления, термопар, манометров и т.п.).
Дискретные входы используются для задания фиксированных уставок и переключения между режимами.
Дискретные выходы используются для сигнализации: готовности, аварий, состояния.
Релейные выходы используются для дискретного управления, а аналоговые выходы – для непрерывного управления.
Дискретное управление
- 2-х позиционный регулятор использует только 2 состояния:
- включено (открыто)
- выключено (закрыто) Пример: управление нагреванием или охлаждением.
- 3-х позиционный регулятор использует 3 состояния:
- выключено
- вращение по часовой стрелке
- вращение против часовой стрелки (реверс) Пример: управление реверсивным электродвигателем.
- 5-и позиционный регулятор использует 5 состояний:
- выключено
- вращение на первой скорости по часовой стрелке
- вращение на второй скорости по часовой стрелке
- вращение на первой скорости против часовой стрелки
- вращение на второй скорости против часовой стрелки Пример: управление 2-скоростным реверсивным двигателем.
Непрерывное управление
Для непрерывного управления используются ПИД-регуляторы. Возможна реализация каскадного (подчинённого) управления.
Замкнутая система управления

Переходный процесс
Переходный процесс – это реакция системы на внешнее воздействие (задание, возмущение).
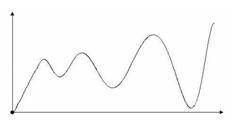
Неустойчивый (расходящийся) переходный процесс
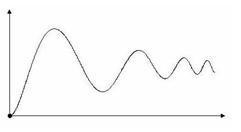
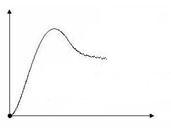
Устойчивый (сходящийся) переходный процесс
 |
 |
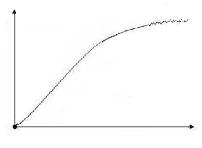 |
| Колебательный | Апериодический | Монотонный |
ПИД-регулятор
С помощью настройки ПИД-регулятора (PID-controller) мы можем скорректировать переходный процесс так, как нам нужно для решения своей задачи.
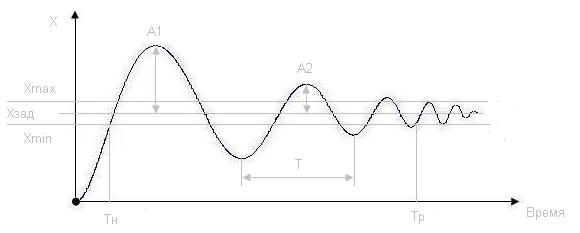
Хзад – заданное (желаемое) значение выходной переменной
Xmax – верхний допустимый предел выходной переменной
Xmin – нижний допустимый предел выходной переменной
Т – период колебаний
Тн – время нарастания
Тр – время переходного процесса (последняя точка пересечения кривой с Xmin или Xmax)
А1 – первое перерегулирование
А2 – второе перерегулирование
d=А1/A2 - степень (декремент) затухания переходного процесса (отношение первого перерегулирования ко второму)
Рассогласование, перерегулирование, время нарастания, время переходного процесса, степень затухания характеризуют качество регулирования.
Пример
ПИД-регулятор открывает и закрывает регулирующий вентиль на горячей трубе так, чтобы из крана текла вода с температурой +40°С с погрешностью плюс-минус 2 градуса. Регулятор вычисляет рассогласование (ошибку) - отклонение реальной температуры (например, +20°С) от заданного значения (+40°С) и решает – когда и насколько необходимо приоткрыть горячий вентиль, чтобы температура повысилась на 20С. Реальную (фактическую) температуру регулятор узнаёт с помощью датчика температуры (обратная связь), а заданную температуру (уставку) ему сообщает оператор, например, набирая число «40» на своём ПК.
Чтобы настроить ПИД-регулятор, необходимо подобрать правильную комбинацию трёх коэффициентов:
- Пропорционального – Kp
- Интегрального – Ki
- Дифференциального – Kd
Могут использоваться и более простые - П и ПИ-регуляторы.
Формула ПИД-регулятора

где e(t) - ошибка (рассогласование), u(t) - выходной сигнал регулятора (управляющее воздействие).
Чем больше Пропорциональный коэффициент, тем выше быстродействие, но меньше запас устойчивости. Но! простой П-регулятор не может полностью отработать рассогласование, т.е. всегда работает с ошибкой.
ПИ-регулятор позволяет избавиться от статической (установившейся) ошибки, но, чем больше Интегральный коэффициент, тем больше перерегулирование (динамическая ошибка).
ПИД-регулятор позволяет нам уменьшить перерегулирование, но, чем больше Дифференциальный коэффициент, тем больше погрешность из-за влияния шумов.
Если шумы идут по каналу обратной связи, то мы можем их отфильтровать с помощью фильтра низкой частоты, но чем больше постоянная этого фильтра, тем медленнее регулятор будет отрабатывать возмущения.
Настройка ПИД-регулятора по методу Циглера-Николса
Циглер и Николс предложили свой вариант быстрой настройки ПИД-регулятора для периодического переходного процесса, в котором затухание примерно равно 4.
- Обнуляем Ki и Kd
- Постепенно увеличиваем Kp до критического значения Kc, при котором возникают автоколебания
- Измеряем период автоколебаний Т
- Вычисляем значения Kp, Ki и Kd по разным формулам для разных регуляторов:
- для П-регулятора: Kp=0,50*Kc
- для ПИ-регулятора: Kp=0,45*Kc, Ki=1,2*Kp/T
- для ПИД-регулятора: Kp=0,60*Kc, Ki=2,0*Kp/T, Kd=Kp*T/8
Каскадный регулятор (подчинённое управление)
Продолжение примера
Теперь нам захотелось добавить комфорта и сделать так, чтобы уставка задания температуры воды менялась в зависимости от температуры воздуха на улице (на улице мороз – вода горячая, на улице жара – вода прохладная). Можно установить ещё один регулятор комфортной температуры, который по показаниям термометра узнаёт фактическую температура наружного воздуха и решает, что комфортная температура воды должна быть, например, +40°С, поэтому он выдаёт задание регулятору температуры воды – поддерживать температуру на уровне +40С (см. пример выше). Здесь мы имеем каскадное регулирование: контур регулирования температуры воды подчинён контуру регулирования комфортной температуры воды.
С помощью регуляторов процесса мы можем реализовать и более сложные связи. Например, поддерживать постоянный расход и температуру воды, независимо от давления и температуры горячего и холодного трубопроводов.
Упреждающее регулирование (Feedforward Control)
Не всегда простой ПИД-регулятор в системе с обратной связью может обеспечить требуемое быстродействие из-за возникновения нежелательных колебаний или недопустимо большого перерегулирования. Для улучшения характеристик регулирования применяют комбинированное управление – с обратной связью (closed-loop) и без обратной связи (open-loop). К управляющему воздействию (выходу регулятора) добавляется сигнал упреждающего воздействия, который не зависит от рассогласования, а значит, не может вызвать автоколебания в системе.
Продолжение примера
Если мы доверяем прогнозу погоды, то вместо каскадного управления мы можем реализовать упреждающее регулирование без измерения уличной температуры: читаем прогноз на завтра, задаём уставку +40°С по таймеру времени на завтра на 7 утра.Если измерить возмущение, то можно подать упреждающее воздействие, которое компенсирует влияние этого возмущения на процесс до того, как начнёт изменяться регулируемый параметр.