Урок 6
Интеграция ProSafe-RS и CENTUM VP по шине Vnet/IP
ProSafe-RS не имеет своего собственного операторского интерфейса (HMI). В качестве HMI будем использовать станцию оператора HIS системы CENTUM VP.
Для интеграции проектов РСУ и ПАЗ инженеру ПАЗ необходимо иметь лицензию “CENTUM VP/CS 3000 Integration Engineering Package”.
Перед выполнением этого урока рекомендуется выполнить уроки 1-4 из Пошагового самоучителя CENTUM VP.
Для тестирования приложения интегрированной конфигурации РСУ и ПАЗ используется симулятор станции безопасности на ПК - SCS Simulation Test. Для работы этого симулятора требуется драйвер шины управления (Vnet/IP), сам адаптер шины управления (сетевая карта) не требуется.
Vnet/IP Open Communication Driver необходим, если установлен адаптер шины управления.
Если вы сначала установили драйвер шины управления, а потом установили адаптер шины управления, то необходимо переустановить драйвер.
Для интеграции ProSafe-RS и CENTUM VP важно соблюдать порядок инсталляции программного обеспечения.
Задание
Вывести на экран станции оператора РСУ сигнал из системы ПАЗ.
Решение
Для интеграции РСУ и ПАЗ необходимо доработать оба проекта.
Инжиниринг на стороне ПАЗ ProSafe-RS
-
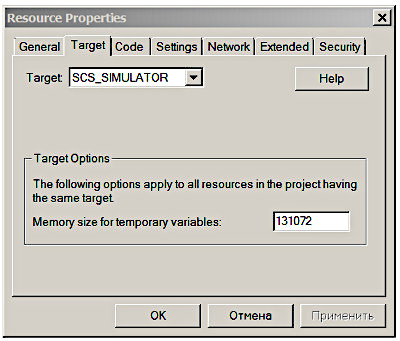
В свойствах ресурса на вкладке Target выбираем Target: SCS_SIMULATOR
-
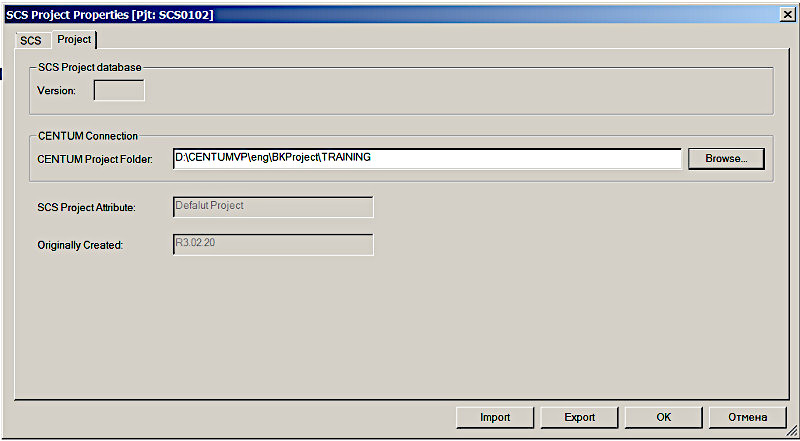
Сообщаем проекту ПАЗ информацию о папке, в которой хранится проект РСУ:
- В меню Инжиниринг выбираем пункт SCS Project Properties
- Переходим на закладку Project
- Выбираем папку, где храниться проект РСУ:
-
Регистрируем переменные ПАЗ, которые необходимо интегрировать в РСУ:
- Из меню Инжиниринг открываем редактор имён тегов – Tag Name Builder
- Переходим на закладку IO_BOOL:

-
В левой части панели видны переменные подходящего типа: DI1, DI2, DI3, DO1
Дважды щёлкаем на имени переменной DI1 в левой части панели – имя переменной переносится в правую часть панели:
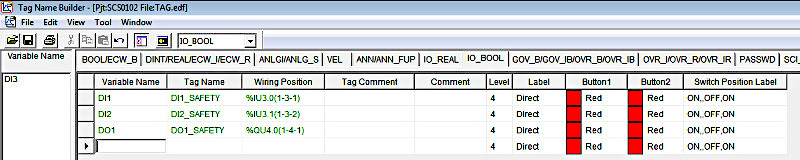
Аналогично регистрируем переменные: DI2, DO1
Задаём имена тегов в системе РСУ CENTUM
VP, соответствующих этим переменным: DI1_SAFETY, DI1_SAFETY, DO1_SAFETY -
Компилируем проект:
Project>Build Project - Выполняем анализ целостности и анализ перекрёстных ссылок (см. Урок 2)
Инжиниринг на стороне РСУ CENTUM VP
- Открываем среду разработки System View
-
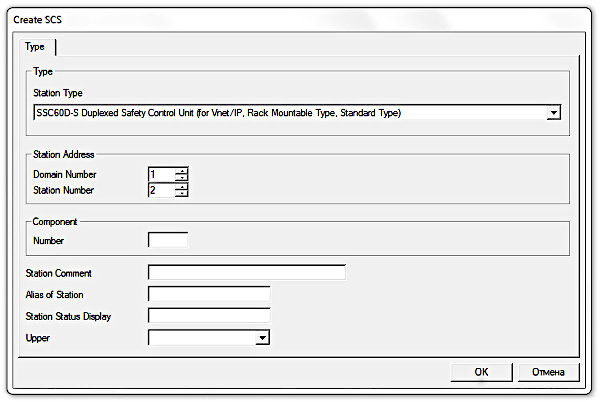
Добавляем в проект TRAINING новую станцию безопасности:
TRAINING > Create New > SCS…
-
Генерируем список тегов станции безопасности:
SCS0102 > Tools > SCS Tag List Import
- Нажимаем [OK]
Тестирование интеграции
-
В среде разработки ПАЗ Workbench запускаем симулятор SCS из сервисного меню:
Tools > Maintenance > SCS Test Function
Автоматически запускается среда исполнения РСУ CENTUM VP -
Вызываем лицевую панель импортированного из ПАЗ тега DI1_SAFETY:

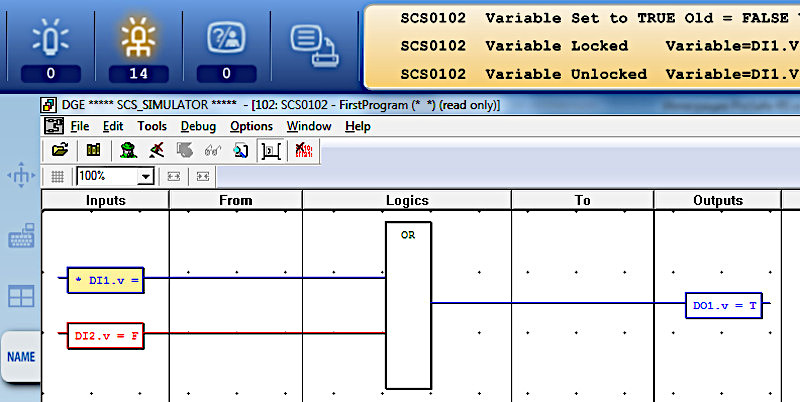
- В среде разработки ПАЗ Workbench открываем программу FirstProgram
-
Запускаем отладчик программы:
Debug > Debug
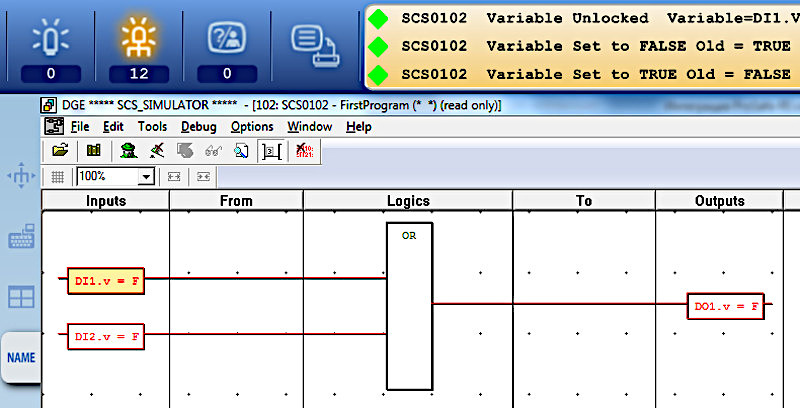
- Дважды щёлкаем по элементу входа DI1.v
-
В появившемся окне нажимаем кнопку [Lock] (лочим переменную):
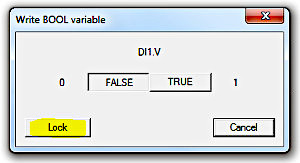
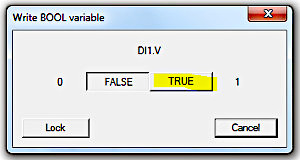
- Ещё раз дважды щёлкаем по элементу входа DI1.v
-
В появившемся окне нажимаем кнопку [TRUE] (форсируем переменную):
-
Статус входа DI1 изменяется на TRUE (цвет изменяется с красного на синий):
-
В HMI РСУ открываем лицевую панель тега DI1_SAFETY и убеждаемся, что статус сигнала изменился на ON:
