Урок 6
Программирование дискретной задвижки в TIA Portal (продолжение уроков 4-5)
Задание
Написать программный блок управления задвижкой.
Решение
-
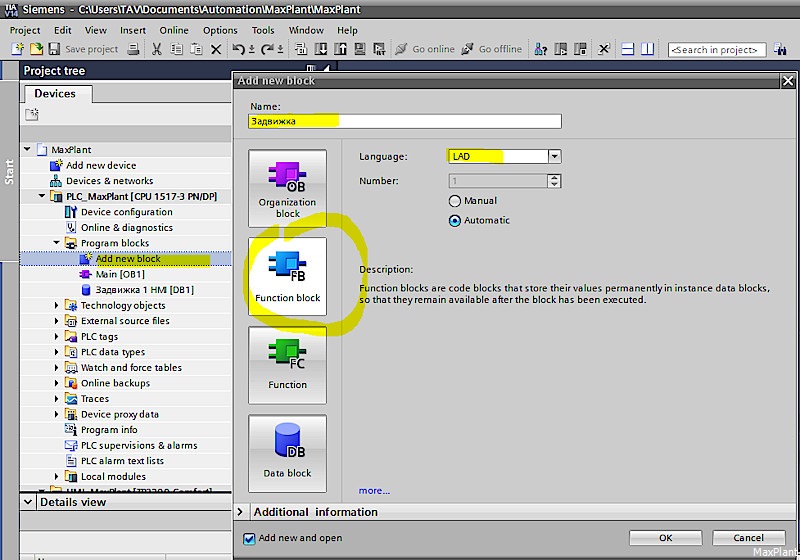
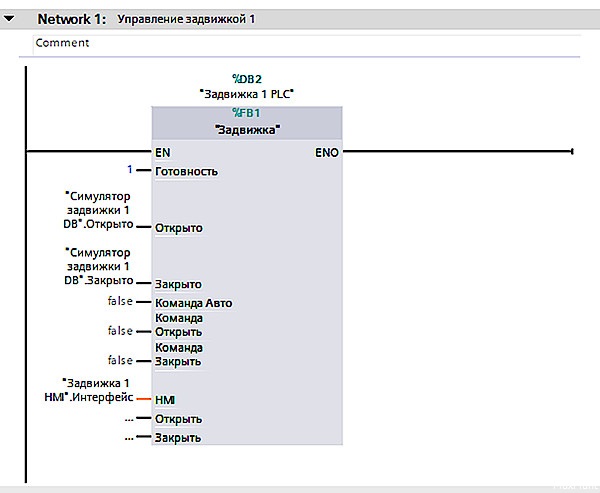
Создаём функциональный блок "Задвижка" на языке LAD:
-
Декларируем переменные функционального блока:
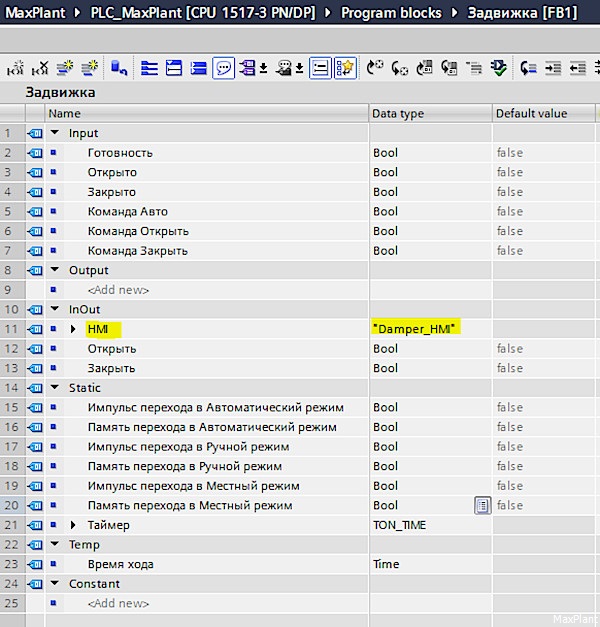
В список входных переменных кроме физических сигналов (Готовность, Открыто, Закрыто) входят команды от других программных блоков: "Команда Авто", "Команда Открыть", "Команда Закрыть".
Весь HMI объявлен как один вход-выход с типом данных "Damper HMI", физические выходы "Открыть" и "Закрыть" записаны как входы-выходы. -
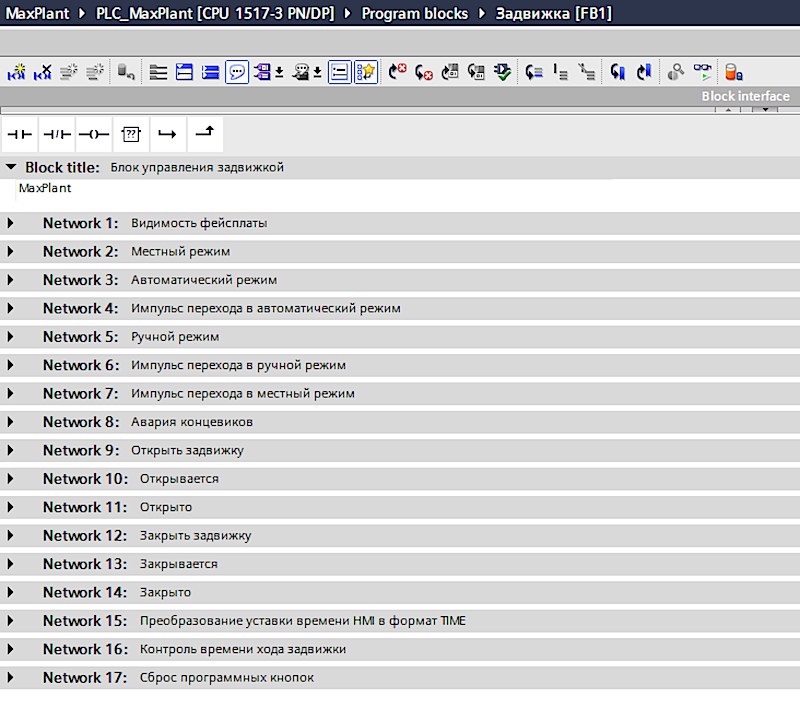
Программа состоит из 17 логических цепочек:
-
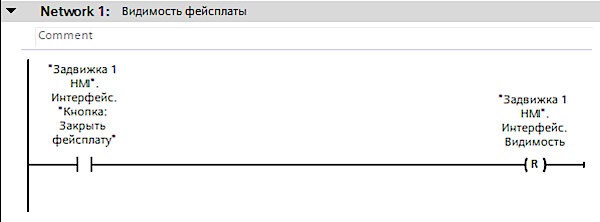
В первой логической цепочке программируем реакцию на нажатие кнопки "Закрыть фейсплату":
-
Во второй логической цепочке программируем реакцию на сигнал "Готовность":
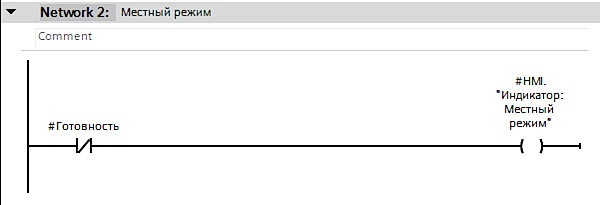
-
В третьей логической цепочке программируем условие перехода в автоматический режим:
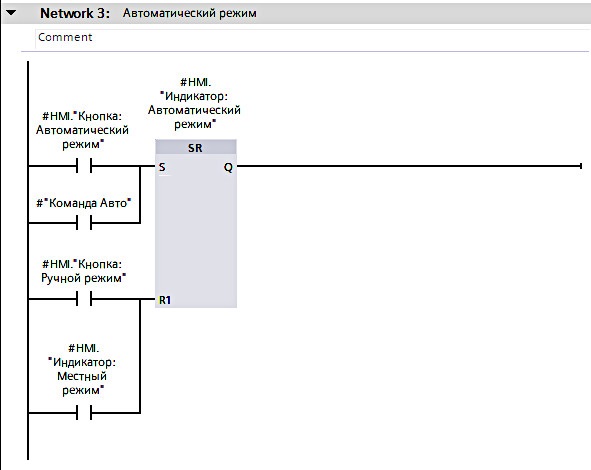
-
В четвёртой логической цепочке программируем импульс перехода в автоматический режим:
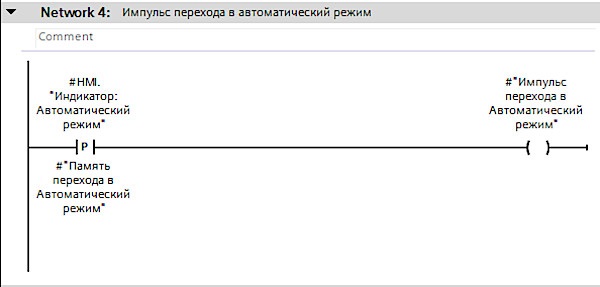
-
В пятой логической цепочке программируем условие перехода в ручной режим:
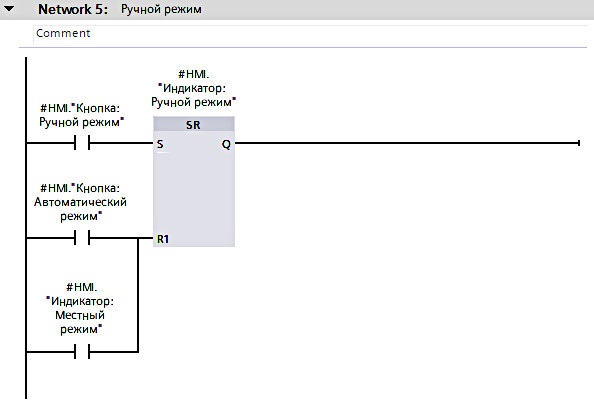
-
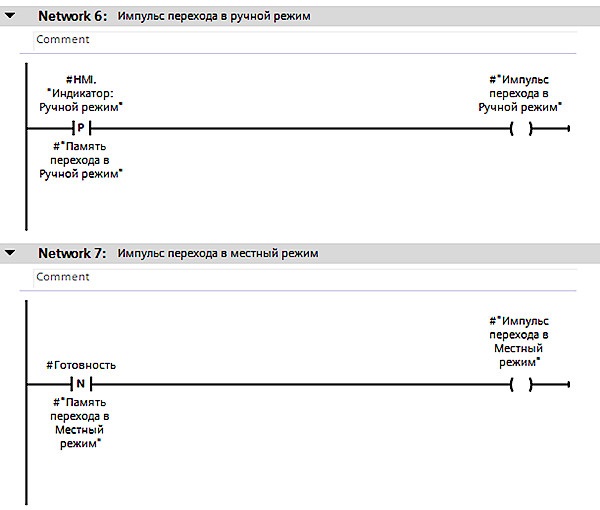
В цепочках 6 и 7 программируем импульсы перехода в ручной и местный режимы:
-
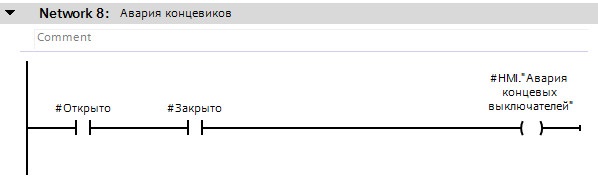
В цепочке 8 программируем условие Аварии концевых выключателей:
-
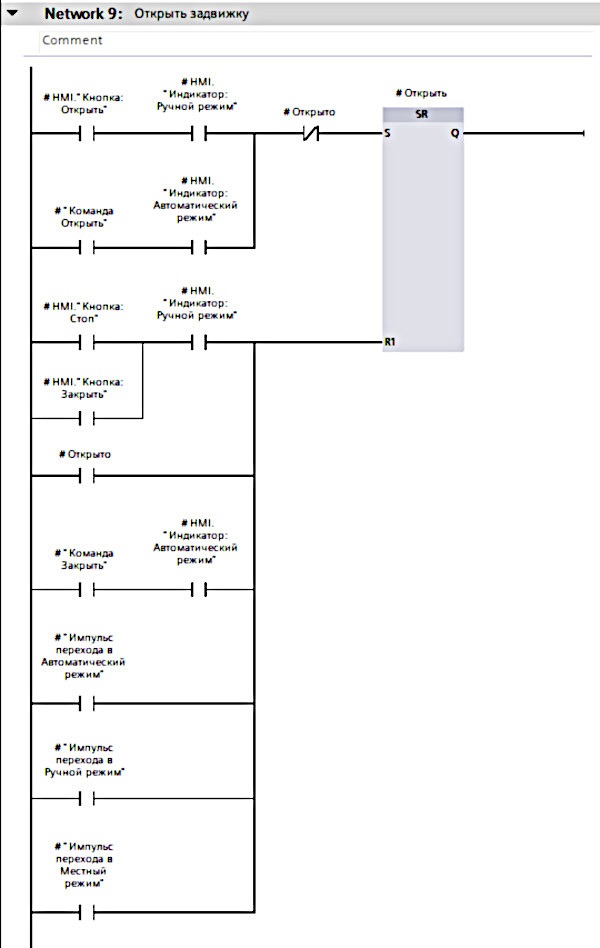
В цепочке 9 программируем условие открытия задвижки:
-
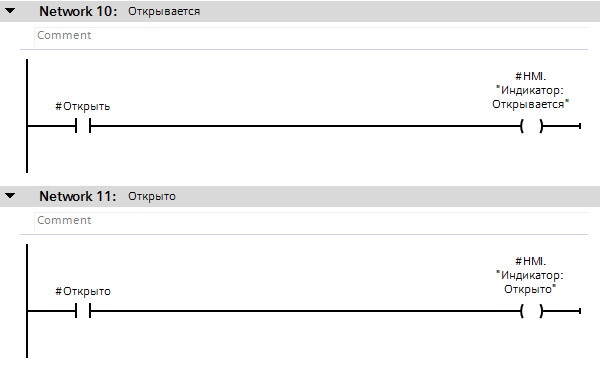
В цепочках 10-11 программируем статусы задвижки "Открывается" и "Открыто":
- Цепочки 12-13 программируем зеркально цепочкам 9-11
-
В цепочках 15-16 программируем контроль времени хода задвижки:
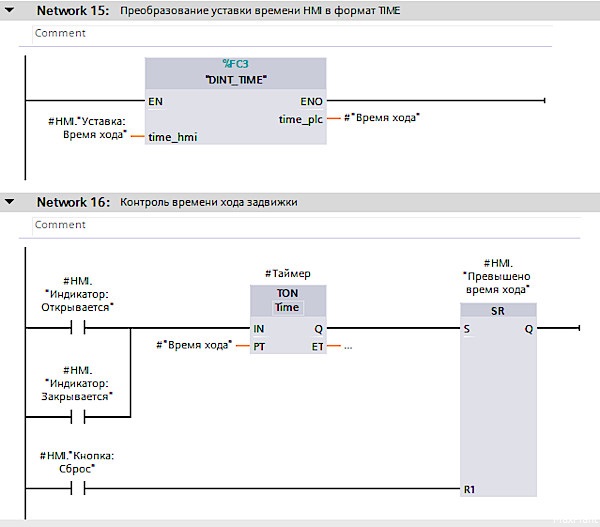
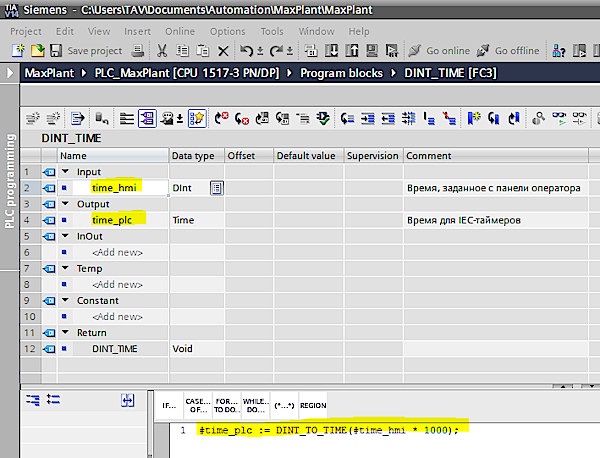
Функция DINT_TIME преобразует уставку времени, введённую через фейсплату в формат времени для IEC-таймера:
-
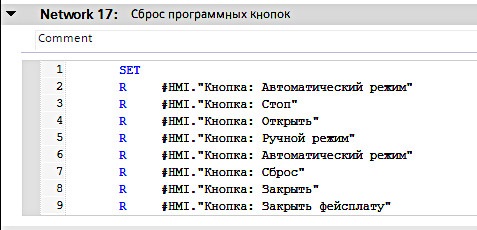
В цепочке 17 на языке STL программируем сброс битов, установленных программными кнопками:
-
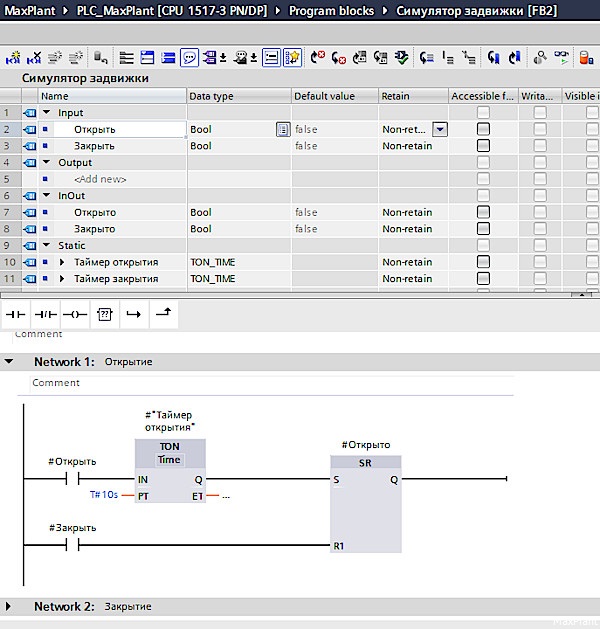
Создаём функциональный блок – симулятор задвижки:
-
Создаём блок OB1 из двух логических цепочек:
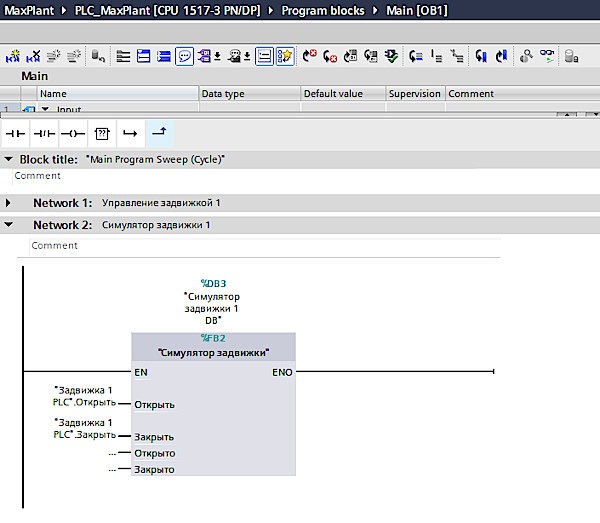
-
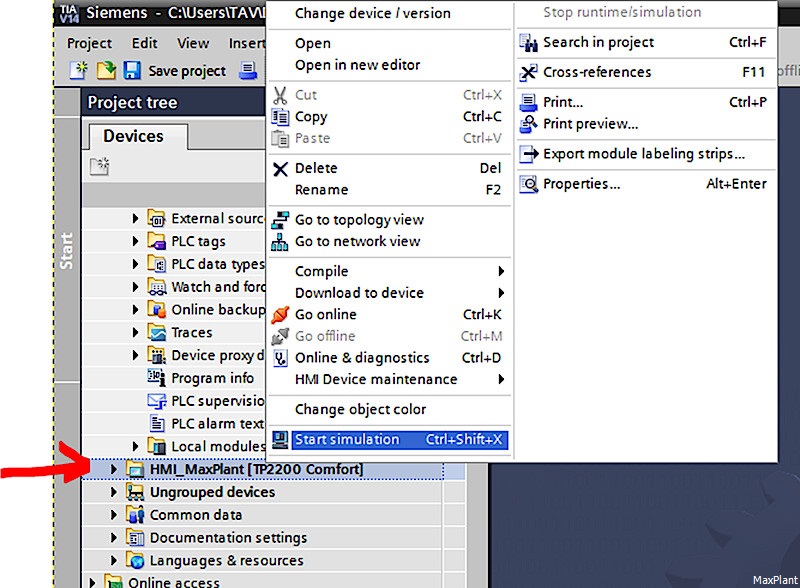
Запускаем симулятор для новых контроллеров, выбираем S7-1500 и нажимаем кнопку Power:
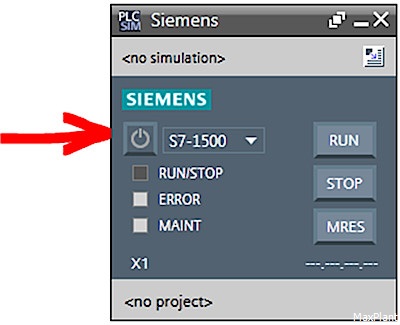
-
Загружаем в симулятор контроллера программу ПЛК:
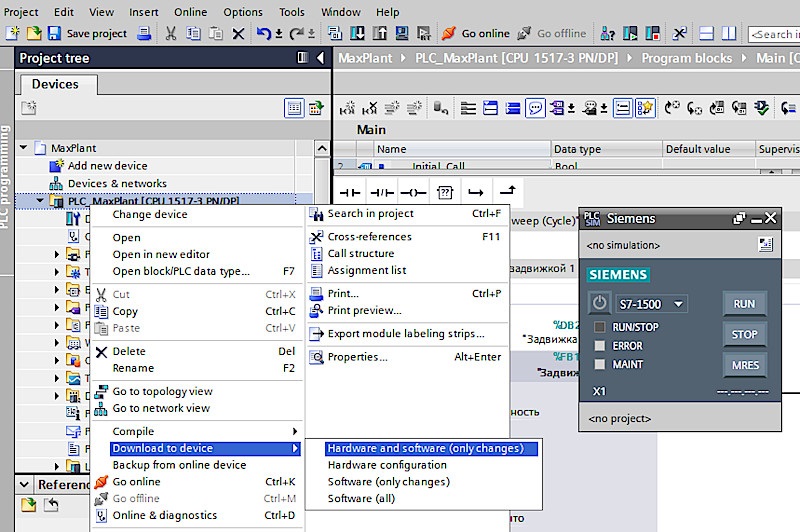
-
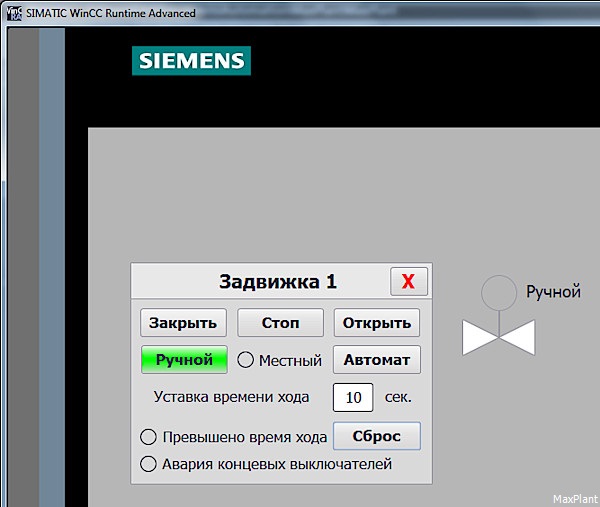
Запускаем симулятор панели оператора:
-
Управляем задвижкой:
Домашнее задание
Добавьте ещё три программных входа:
| Вход | Описание | |
|---|---|---|
| 1 | Trip | При поступлении сигнала FALSE на этот вход, задвижка переходит в безопасное состояние |
| 2 | Safety | Выбор безопасного состояния задвижки: 1 – Открыто 0 - Закрыто |
| 3 | Ремонт | При поступлении сигнала TRUE на этот вход, задвижка переходит в режим "Ремонт", в котором она не реагирует на входы |