Урок 20
Настройка преобразователя частоты Altivar Process ATV600
Задание
Настроить ПЧ на работу по следующему алгоритму:- Тип управления: поддержание давления.
- Управление в местном режиме от пульта местного управления (ПМУ).
- Управление в автоматическом режиме от операторской панели (ОП) и ПЛК.
- Команды СТАРТ, СТОП и СБРОС ОШИБКИ подаются на дискретные входы ПЧ.
- На релейные выходы ПЧ подаются сигналы РАБОТА и ОШИБКА ПЧ для передачи в ПЛК и на ПМУ.
- Кнопка аварийного останова подключается на дискретные входы ПЧ для безопасного останова Safety STO.
- Датчик давления и сигнал задания давления от ПЛК подключаются к аналоговым входам ПЧ (4..20мА).
- По шине PROFINET ПЛК получает данные о состоянии ПЧ.
- При переходе в местный режим управления уставка задания давления берётся из памяти ПЧ.
- При обрыве любого входного аналогового сигнала двигатель продолжает вращаться с такой же скоростью, что и до обрыва.
- Перегрев двигателя должен контролироваться с помощью встроенных термисторов.
- Датчика сухого хода нет, поэтому сухой ход насоса должен контролироваться косвенно по недогрузке двигателя.
- Минимальная частота вращения двигателя насоса – 30 Гц.
- Время плавного разгона и торможения – 10 секунд (чтобы не было гидроударов).
Решение
- Выбираем ПЧ для насосно-вентиляторных приложений из серии Altivar Process ATV600.
- В правый слот расширения устанавливаем опциональный коммуникационный модуль PROFINET.
- Сигналы ПУСК, СТОП и СБРОС ОШИБКИ ПЧ от ПЛК и ПМУ заводим на коммутатор источника управления (ПЛК или ПМУ), а от него уже на дискретные входы ПЧ: СТОП (нормально замкнутый контакт) - на DI1, ПУСК – на DI2, СБРОС ОШИБКИ ПЧ – на DI4.
- Переключатель режима работы МЕСТНЫЙ (на ПМУ) подключаем к дискретному входу DI3.
- Подключаем двигатель к клеммам ПЧ: U/T1, V/T2, W/T3.
- Подключаем 3-х фазную сеть к клеммам ПЧ: R/L1, S/L2, T/L3.
- Устанавливаем на ПК бесплатную программу SoMove для конфигурирования и пусконаладки ПЧ Altivar.
- Устанавливаем на ПК библиотеку (DTM файлы) для работы с ПЧ серии ATV600.
- Устанавливаем в ПЧ опциональный коммуникационный модуль PROFINET.
- Соединяем патч-кордом ПК и ПЧ.
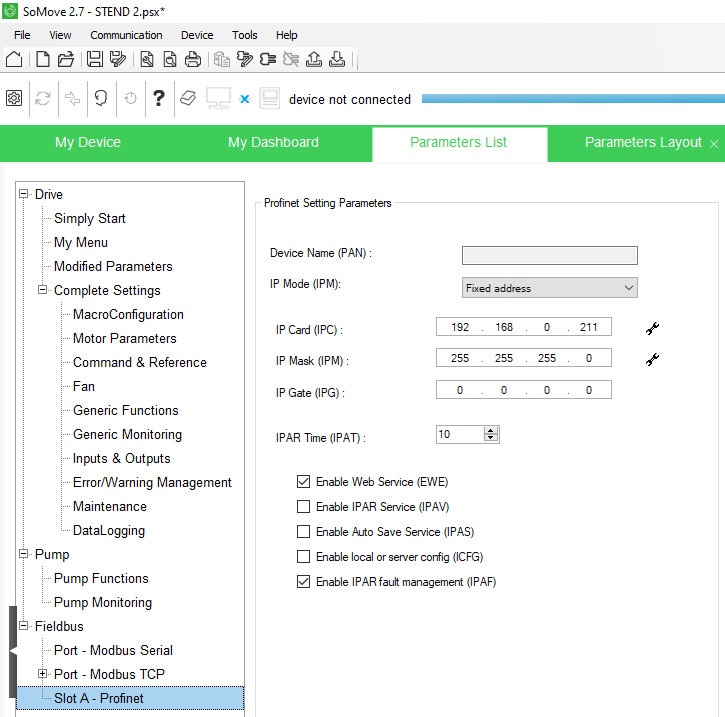
- Запускаем программу SoMove, создаём новый проект и в разделе "Fieldbus \ Slot A – Profinet"
конфигурируем параметры сети PROFINET:
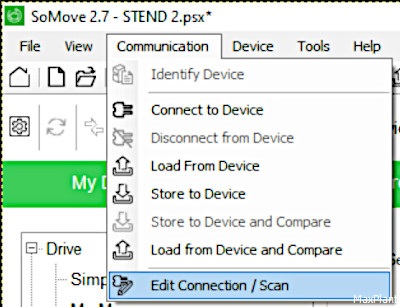
- Для подключения SoMove по сети PROFINET к ATV600 выполним дополнительную настройку в меню
"Edit Connection / Scan":
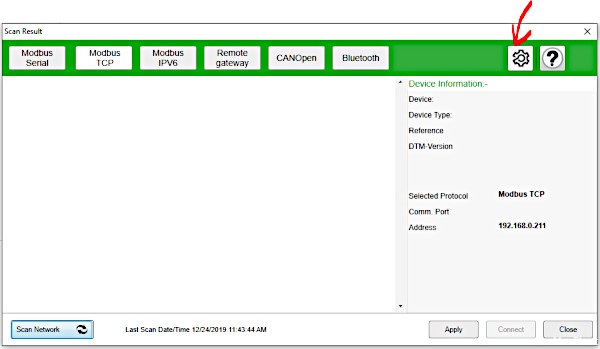
- Нажимаем на кнопку [Advance Setting]:
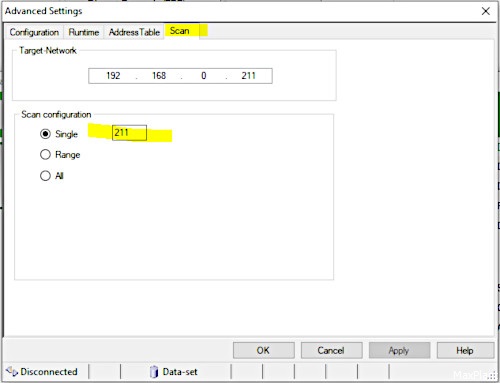
- В появившемся окне нажимаем кнопку [More]:
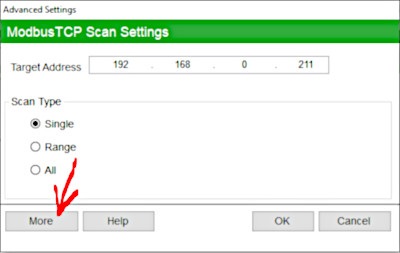
- В появившемся окне на вкладке "Scan" задаём адрес следующим образом:
- Нажимаем кнопку [Scan Network]:
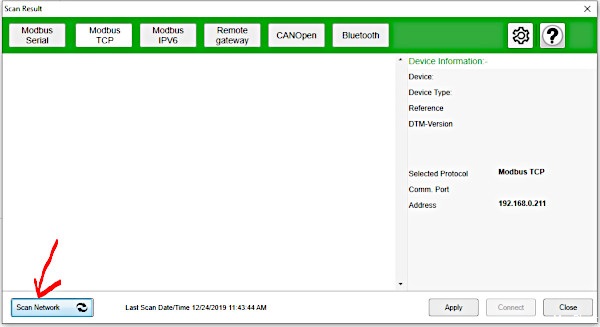
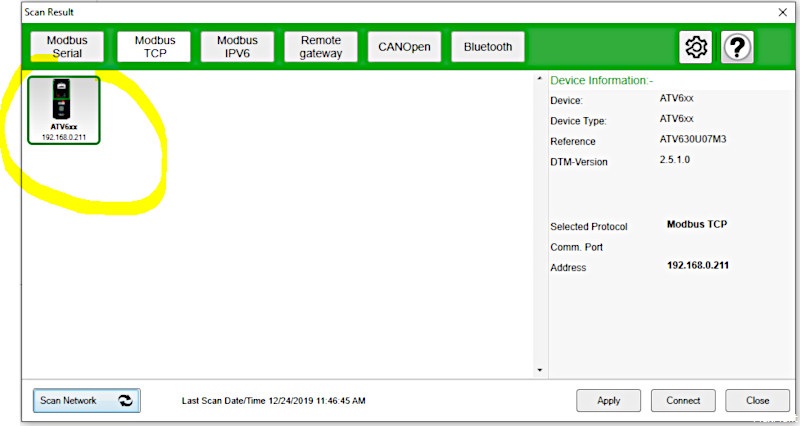
Программа сканирует сеть и обнаруживает ПЧ:
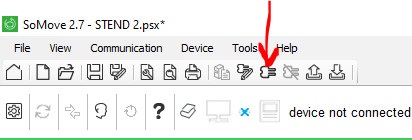
- Нажимаем кнопку [Connect to Device]:
- В появившемся окне нажимаем кнопку [Load from device and Connect]:
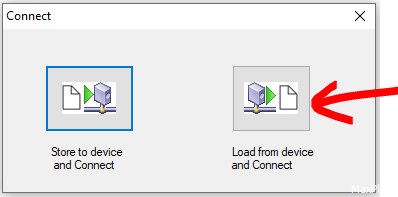
SoMove подключается к ПЧ и считывает в открытый проект из ПЧ все его текущие параметры.
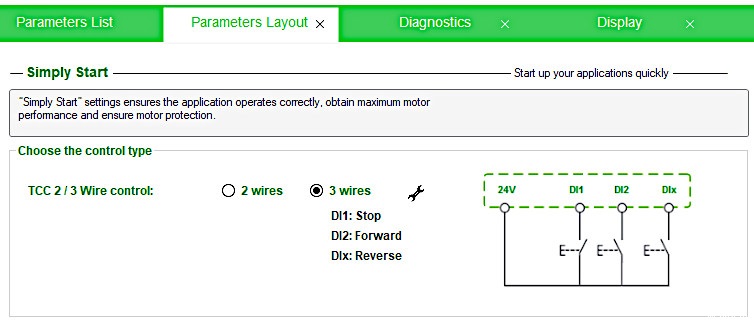
В этом состоянии изменение параметров происходит в режиме онлайн. - В разделе Simply Start выбираем тип управления: 3-х проводной:
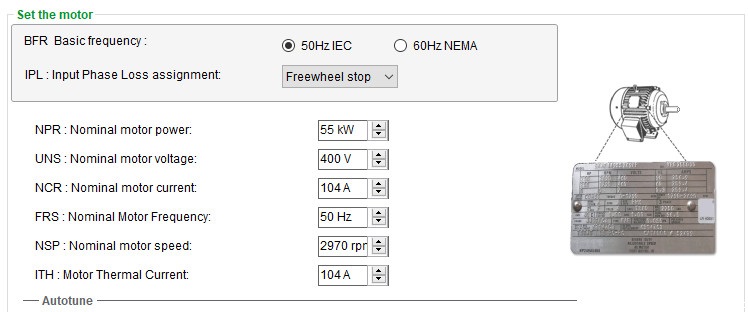
- Переписываем с шильдика электродвигателя номинальные параметры:
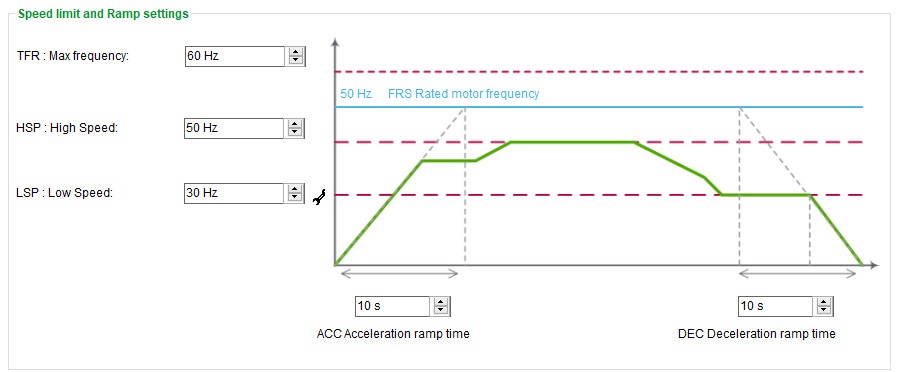
- Задаём ограничения скорости, время плавного разгона и торможения:
- Активируем управление приводом от SoMove - нажимаем кнопку [Control Panel]:
и в появившейся панели управления нажимаем кнопку [Enable]:

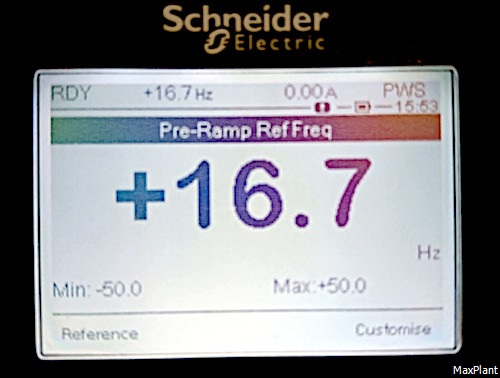
В режиме управления от программы SoMove в правом верхнем углу графического дисплея ПЧ появляются три буквы – PWS:
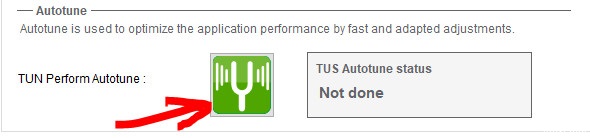
- После базовой настойки ПЧ выполняем процедуру автоподстройки ПЧ на остановленном холодном электродвигателе.
Для запуска процедуры Автоподстройки параметру TUN задаём значение YES
или нажимаем на кнопку [TUN Perform Autotune]:
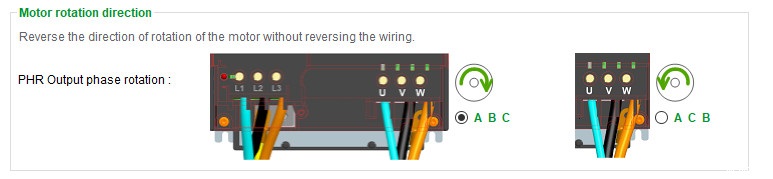
- Определяем направление вращения вала двигателя. В панели управления задаём небольшую частоту и на пару секунд
включаем двигатель кнопками [Run] и [Stop]:

- Если рабочее колесо насоса вращается в противоположном направлении (вентилятор двигателя вращается в
направлении противоположном стрелке на корпусе насоса), то изменяем направление вращения без
перекоммутации моторных кабелей:
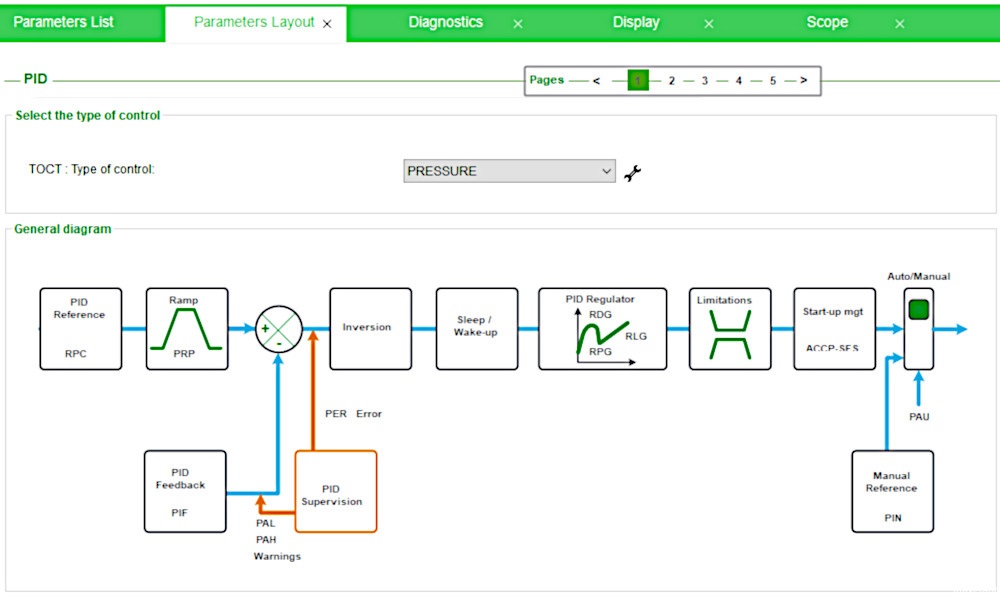
- В разделе PID настраиваем ПИД-регулятор. Выбираем тип управления - PRESSURE (давление):
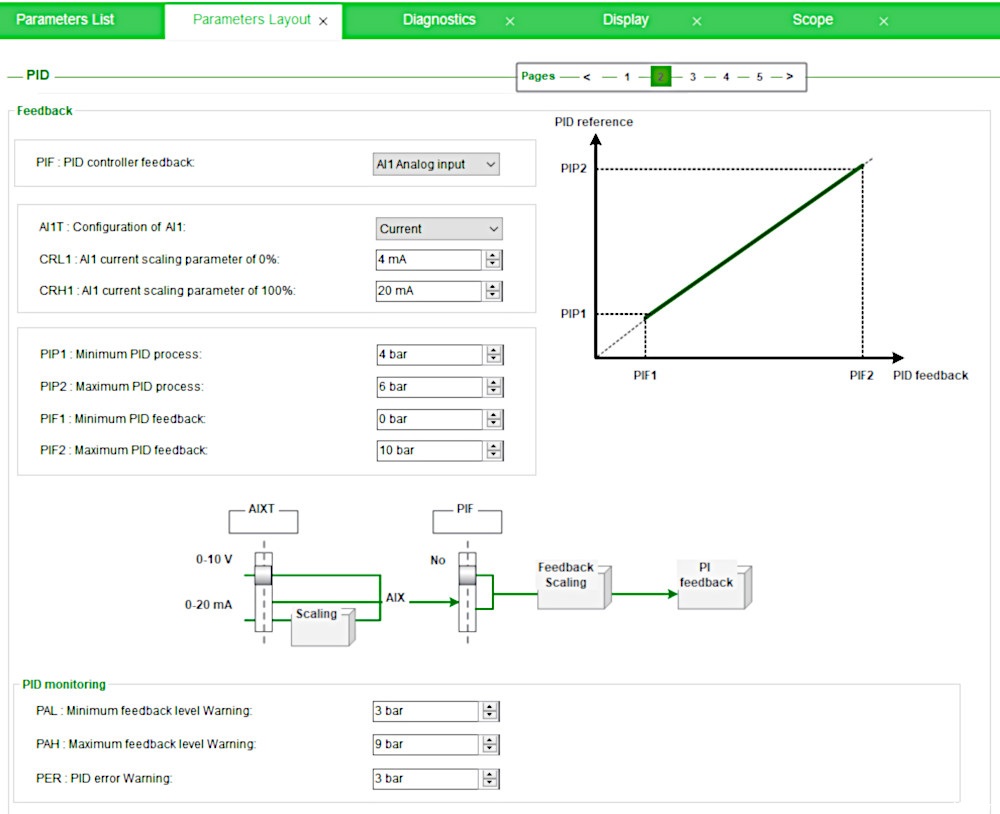
- Конфигурируем обратную связь ПИД-регулятора (PID feedback):
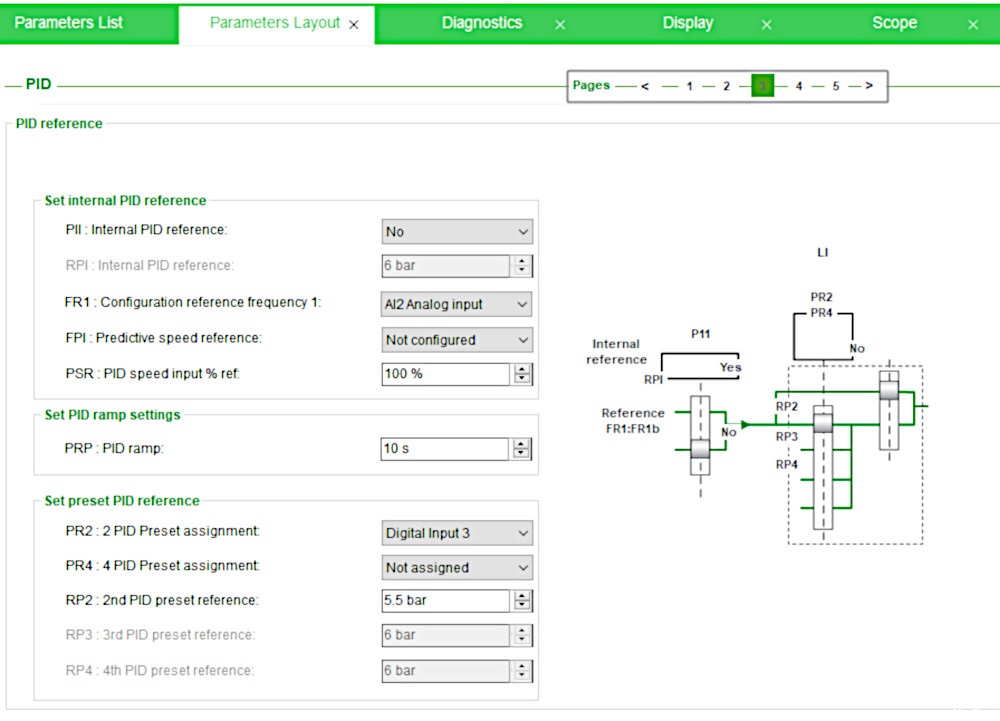
- Конфигурируем задание на ПИД регулятор (PID reference):
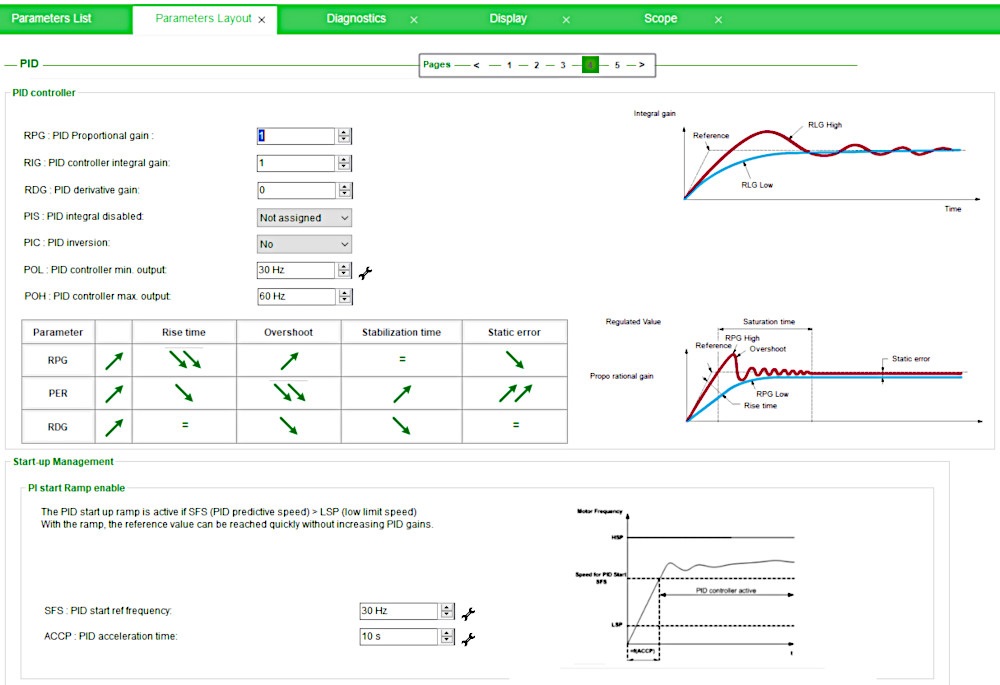
- Настраиваем коэффициенты ПИД-регулятора:
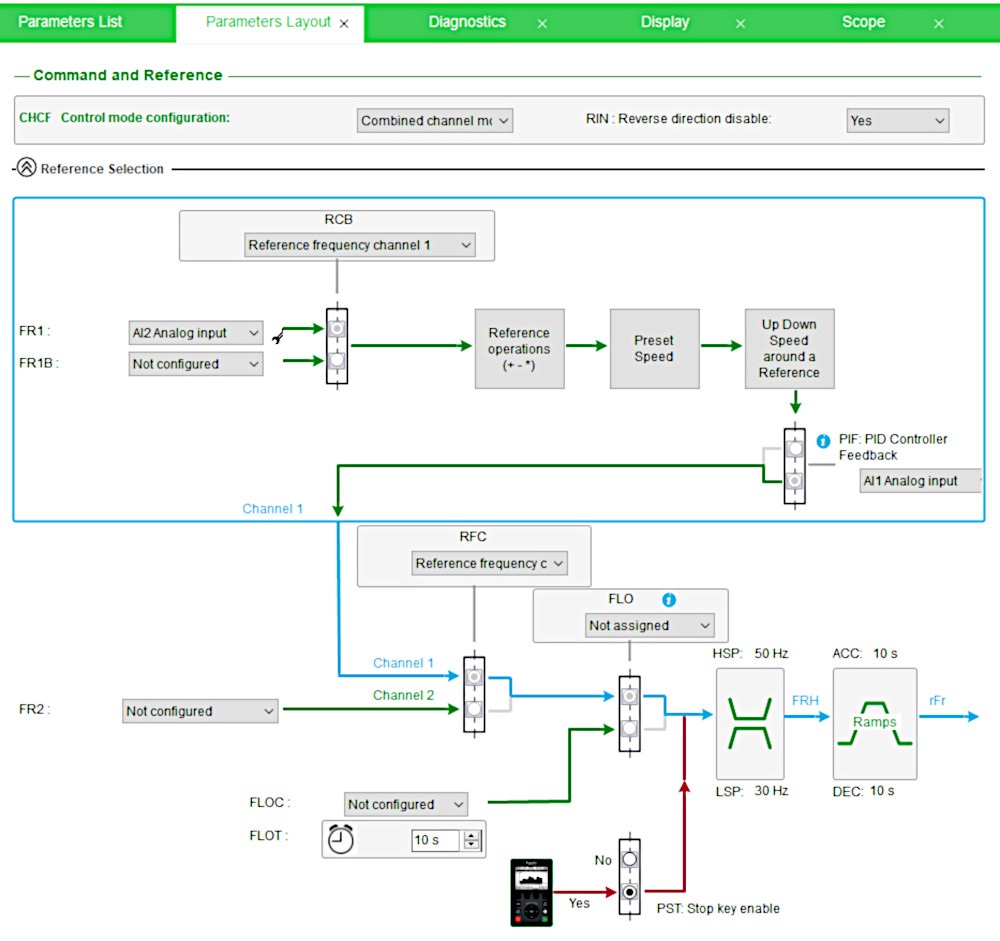
- В разделе "Command and Reference" конфигурируем канал управления (в нашем примере –
управление и задание идут по одному каналу - через клеммник ПЧ):
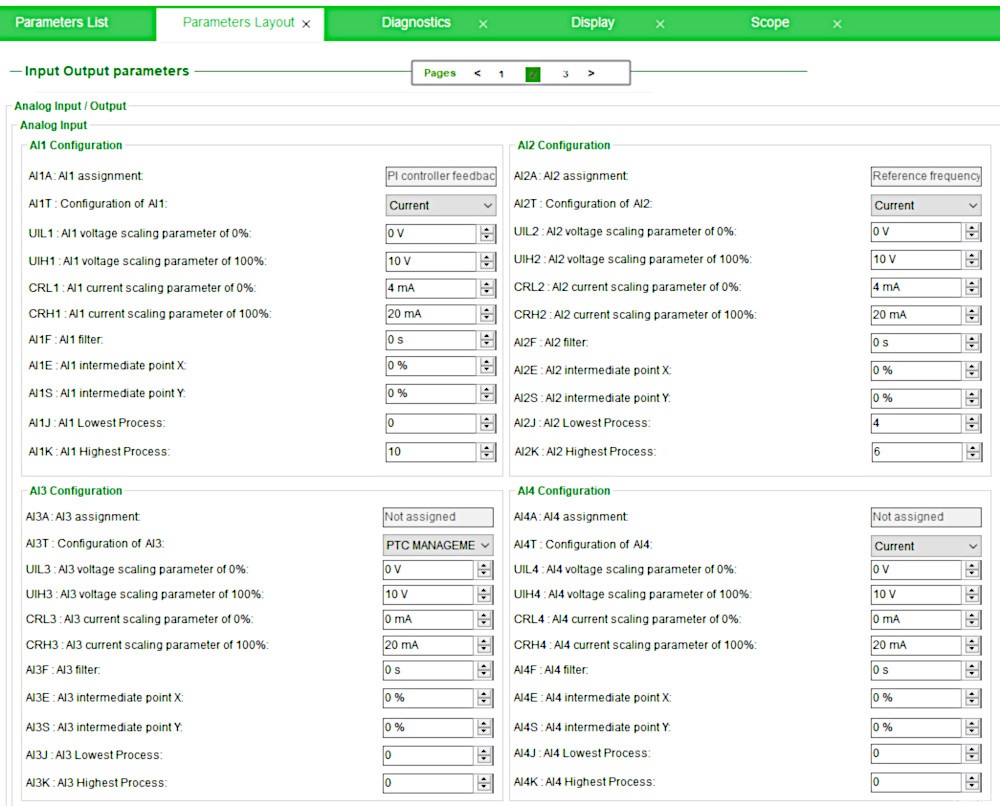
- В разделе "Inputs & Outputs" конфигурируем аналоговые входы:
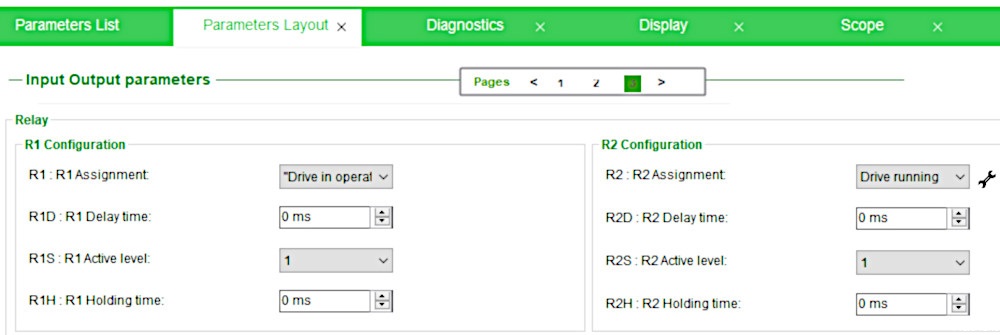
- Конфигурируем релейные выходы:
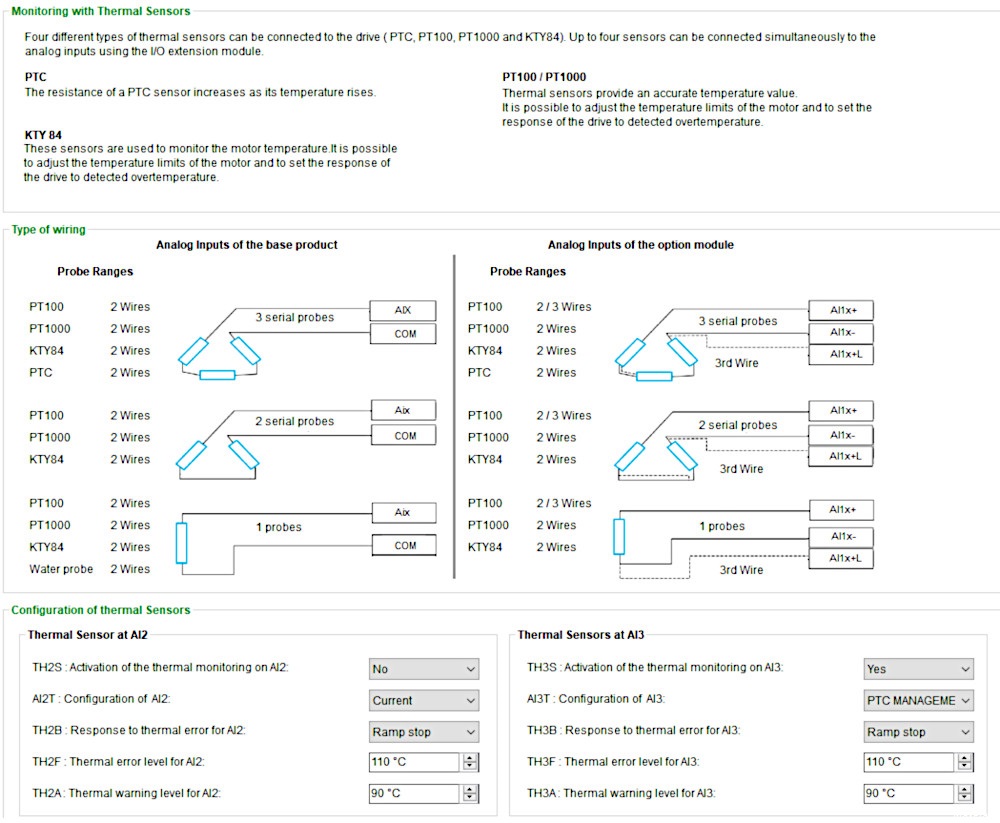
- В разделе "Pump Setting \ Pump Monitoring" конфигурируем контроль перегрева
двигателя с помощью встроенных термисторов:
- В разделе "Error/Warning Management" конфигурируем дискретный вход DI4 на перезагрузку ПЧ для сброса всех ошибок:

- Конфигурируем реакцию ПЧ на обрыв аналоговых входов:

- Конфигурируем реакцию ПЧ на обрыв сети PROFINET:

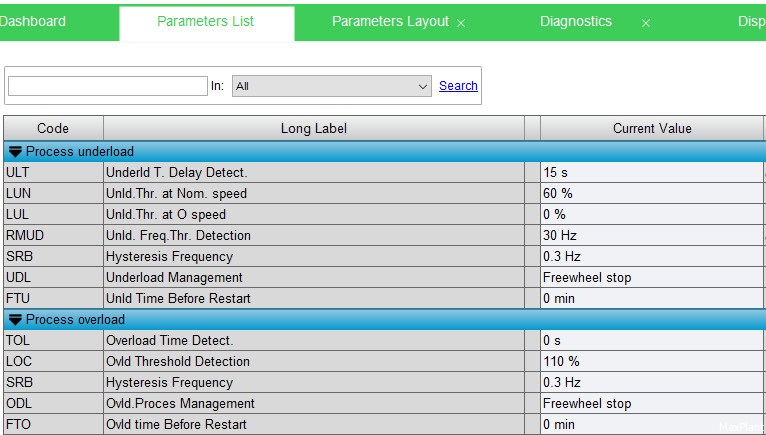
- В разделе "Generic Monitoring" конфигурируем параметры контроля недогрузки и перегрузки двигателя:
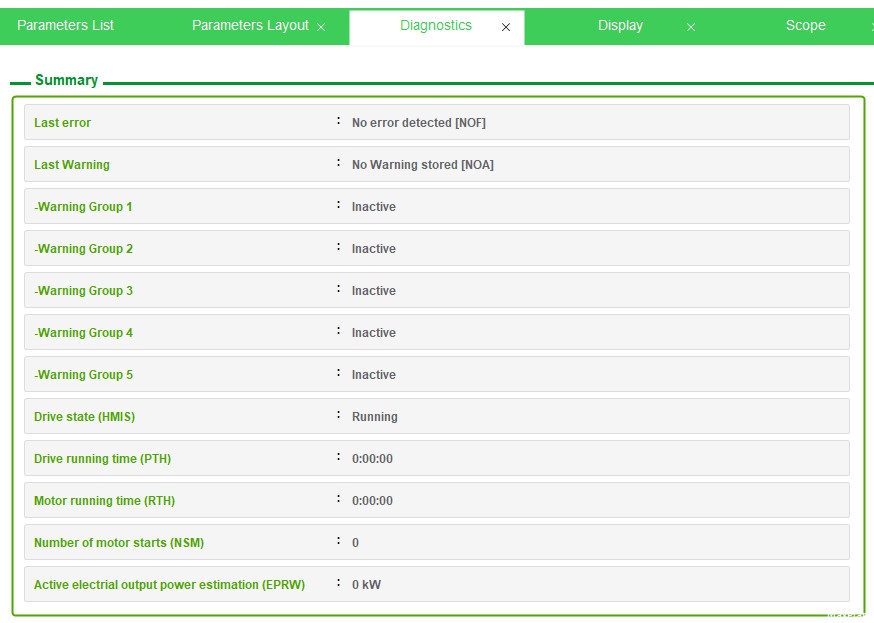
- В разделе "Diagnostics" можно узнать состояние электропривода:
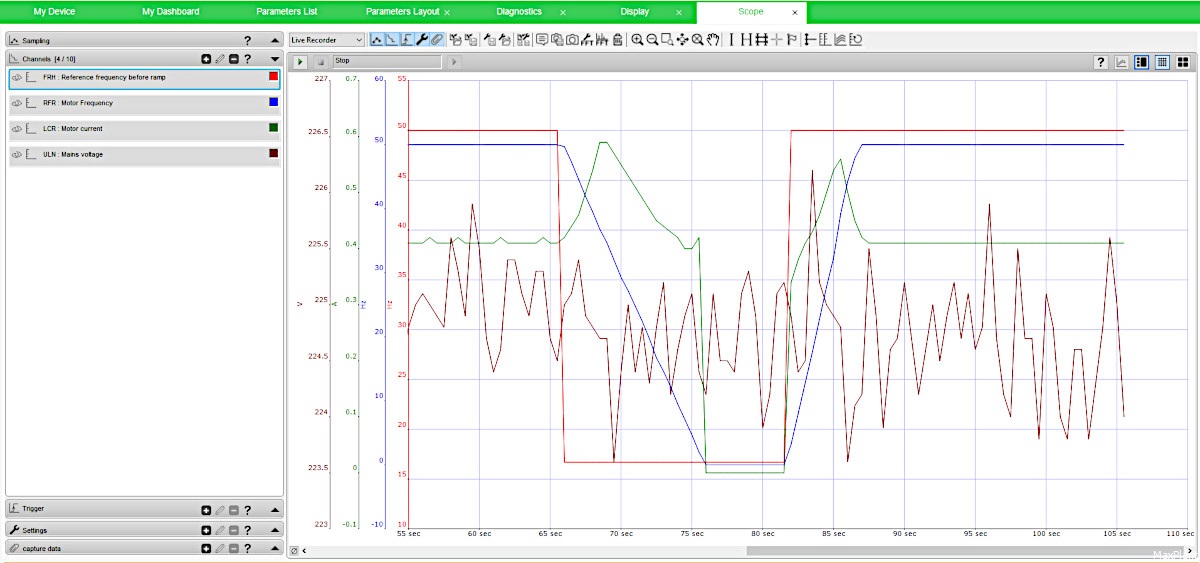
- В разделе "Scope" можно понаблюдать за переходными процессами:
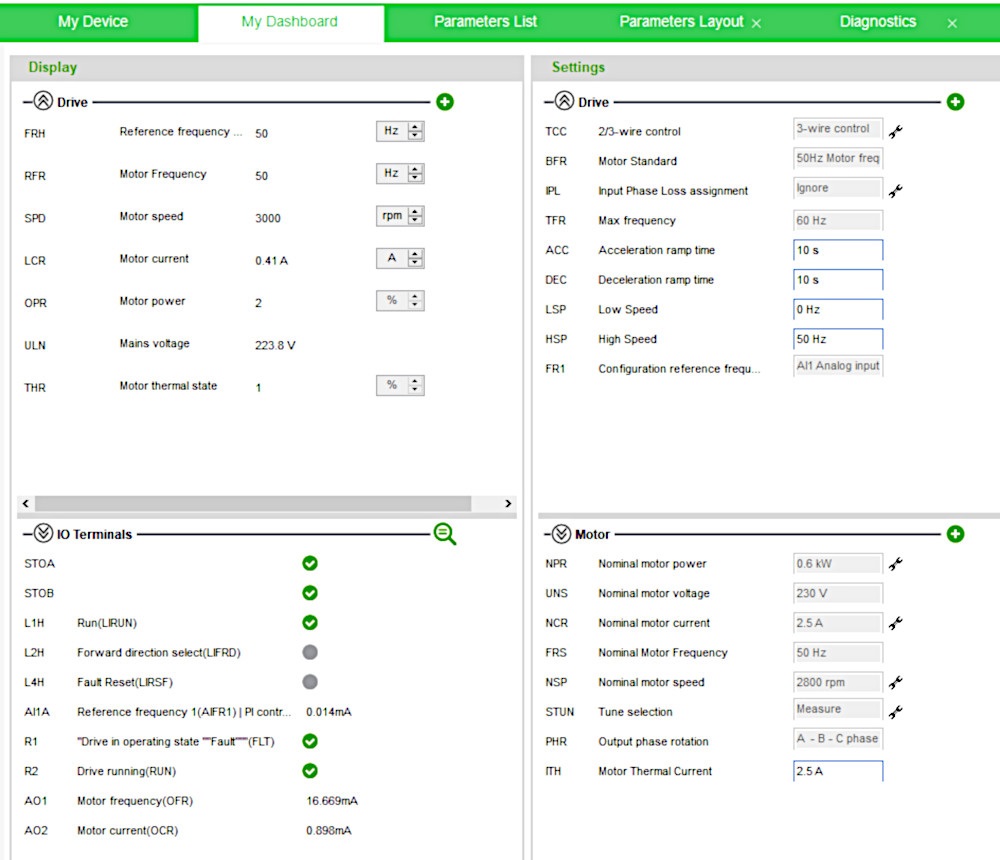
- В разделе "My Dashboard" можно быстро получить необходимую информацию на пользовательских дашбордах:
Урок 21. Обновление прошивки контроллера S7-1500
Урок 19. Групповое квитирование аварийных сообщений в операторских панелях SIMATIC HMI Panels